About Our Project
Supervisor: Vincent Lau
Student: Wang Zehao (Steven)
What is Our Goal...
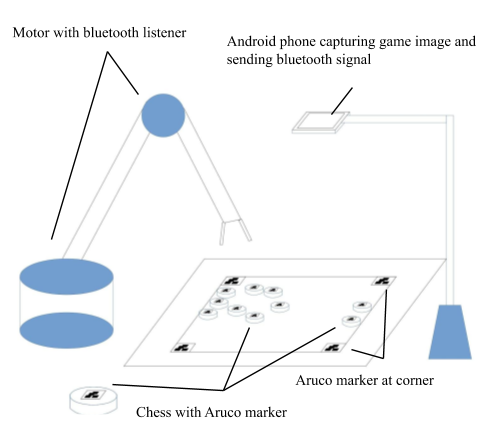
Our goal is to design a robot system with a control unit and a robotic arm. The control unit is able to retrieve current game data from the chessboard through the visual method, process and evaluate the next step, and inform the robotic arm to proceed.
How to Define Our Works...
Chinese Xiangqi:
A game of traditional chess popular in East and Southeast Asia, has a limited study with intelligence applications, thus having a huge value to explore and utilize. Also, as a sport especially popular among the elderly, Xiangqi will significantly benefit them once our study is put into use.
Aruco visual library:
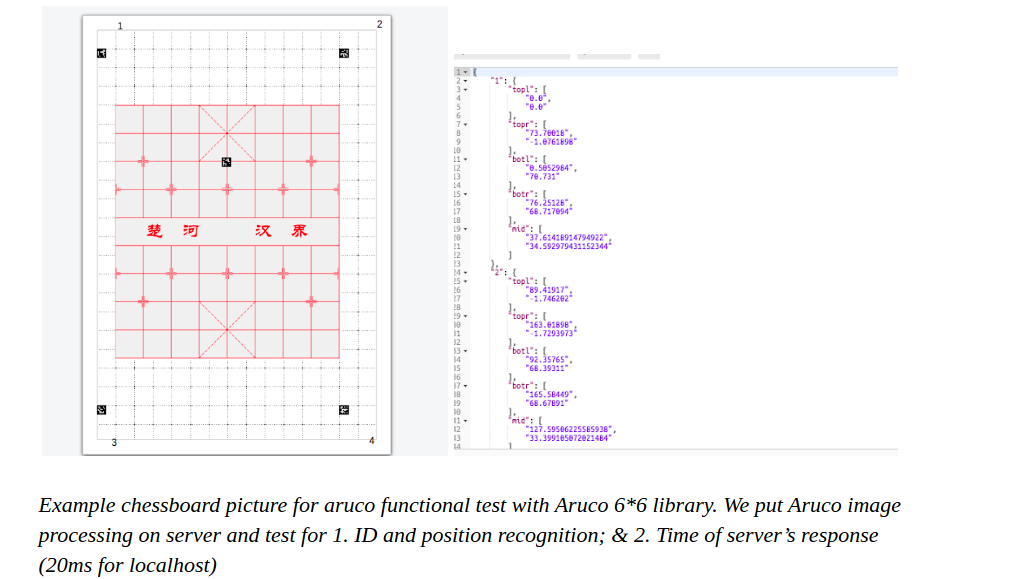
A built-in library for OpenCV, which can detect the moving set of markers in the live feed. We will assign four markers to four corners of the chessboard, and calculate the perspective transformation. We apply the transformation to each chess with a particular id to identify their position and role, thus retrieve the game state.
Backend Logic:
Previous studies have done well with state checking and pruning. We will check them as a reference and implement our project. Also, error alerts should be implemented if the player gives out the wrong step.
Robotic Arm:
A connection with Bluetooth will be an easy way to control and communicate. The robotic arm will be provided after the earlier stage is accomplished. An Aruco code will be attached on the Robotic Arm to adjust and control the picker position
Android Development:
And considering the complexity that microelectronics involved, utilize of Android phones will be an ideal integration of sensors and microcircuit as the central control unit, which is easy to control and implement via coding method and thus more convenient for development than the previous project [4]. Also, phones have a smaller scale and are easy to carry, it will arouse more interest in users, and make it possible to establish its usage and robotic concept into the public.
Our Progress
Our schedule are shown as the following...
Finished
- 9.29------First delieverable
In Progress
- 10.30-----Server build up and test with images
Unfinished
- Stage 1:
- 10.30-----Server adaption to video stream
- 11.30----Android Application build-up
- 11.30----Test on the real phone
- Stage 2:
- 1.30-----Test the robotic arm with Bluetooth signal
- 1.30-----Implement backend logic
- 1.30-----Mock testing
- 1.13-17--First presentation
- 2.2------Interim deliverable
- 2.30-----Robotic arm implementation
- 2.30-----Server for arm position detection
- 3.30-----Final adjust and debug
- 4.15-----Final optimization
- 4.19-----Final deliverable

Documentation
Detailed Project Plan
Available Now
Interim Report
Not Available
home Previous NextFinal Report
Not Available