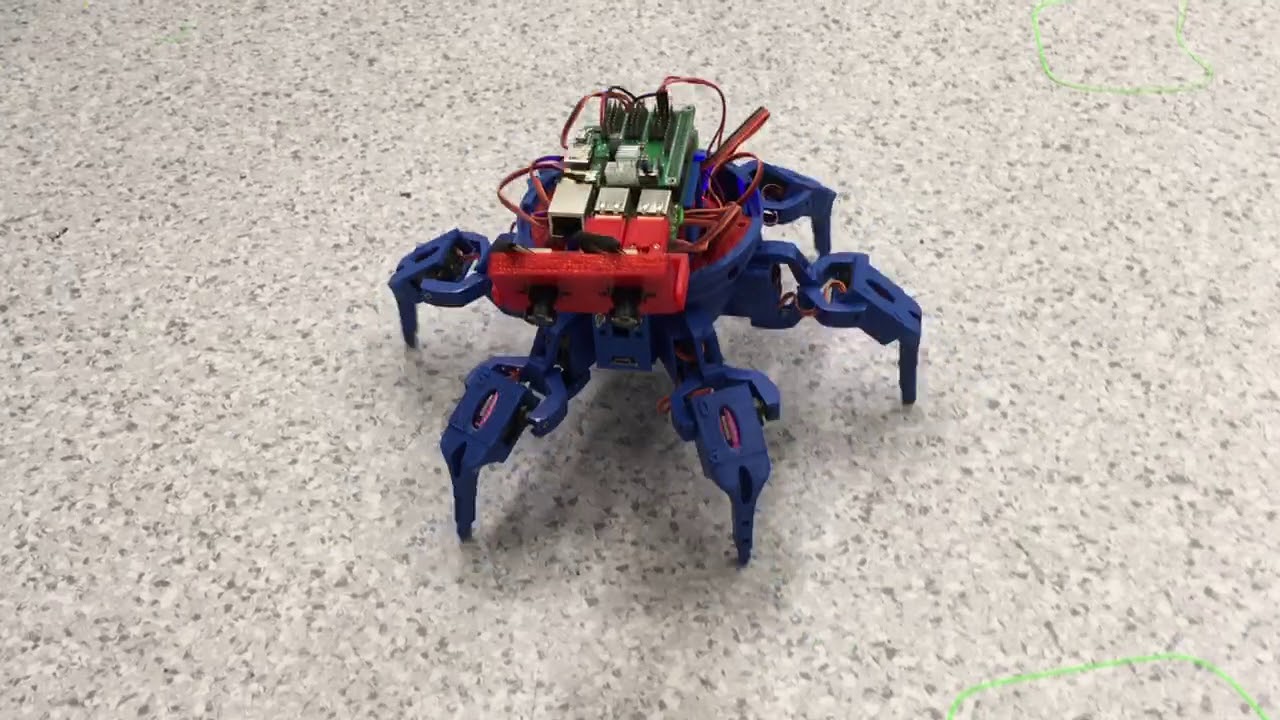
The project involves a six legged robot called a Hexapod developed by the MakerLab of The University of Hong Kong’s CS Department. The hexapod can currently walk and run, being controlled by a remote controller. It also has various types of locomotion capabilities. However, the robot has no ability to move on its own and thus needs to be controlled.
Our project aims to give this hexapod robot the ability to move autonomously and give it understanding of its surroundings using Artificial Intelligence.
In the next phase, the robot should be able to map the floor plan of buildings and demonstrate the ability to recognise its surroundings using techniques like Simultaneous Localization and Mapping (SLAM Algorithms) and computer vision.
The end goal would be a bugbot that can navigate by itself, build a map, and take photos of the scene during the process and produce something similar to the street view of Google Maps.