Video footages for forensic purpose are normally captured from surveillance cameras, but
the objects of interest are usually found to be blurred, making identification of objects
difficult and a tediously time consuming process. The blurring effect is normally due to the
relative motion between camera and the object of interest. This effect, normally known as
motion blurring, is particularly apparent whenever the objects were moving at relatively high
speed and whenever the exposure time of the shutter is relatively long in low lighting
environment. Although it is possible to employ high frame rate camera, which substantially
shortened the exposure time and hence reducing the blurring artifacts due to objectsÆ
motion, it is not a practical and cost-effective solution for actual implementation as high
frame rate camera is a lot more expensive than a normal surveillance camera. On the other
hand, there are techniques to remove motion blur from an image [1], but they normally
require the restrictive assumptions like identical motion model for all the objects in the
scene, or the objects have to undergo unidirectional and constant motion. In view of this,
we propose to develop motion deblurring techniques, which estimates accurate motion
model for each moving object from a number of video frames, and perform object-based
deblurring based on the estimated motion model to improve clarity of the object of interests
in each video frame. Furthermore, since we can enhance the clarity of the same object over
a number of video frames, we can further enhance the clarity of the object based on
super-resolution technique [2].
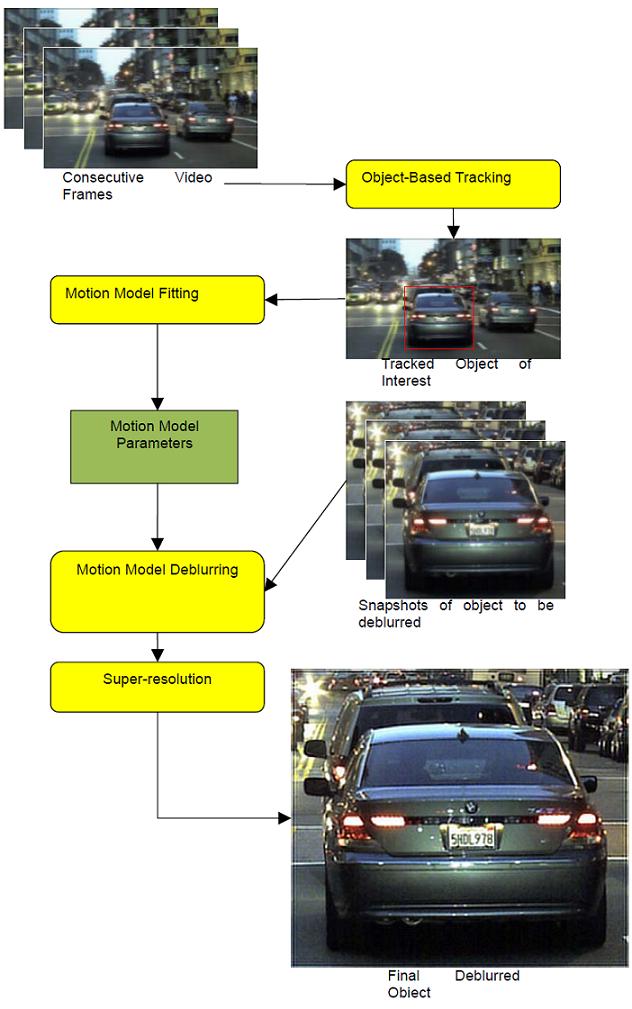
Figure 1: Conceptual workflow of the proposed object-based motion deblurring solution
Figure 1 presents a conceptual diagram of our proposed solution. First, we will take
consecutive frames from the video footage as input, and track the objects of interests to establish correspondence of objects across multiple frames. Once it is done, based on
these correspondences we can fit a parameterized motion model for each object of interest.
This step differs from existing approach [1-3] in the sense that it does not assume the
object to undergo constant and isotropic motion model. Essentially, each object could have
its own motion field, which describes its own motion. Furthermore, existing approach
assume all the pixels of an object have same motion vector, which is not necessarily the
case in practical environment when an object undergoes translational as well as rotational
motion.
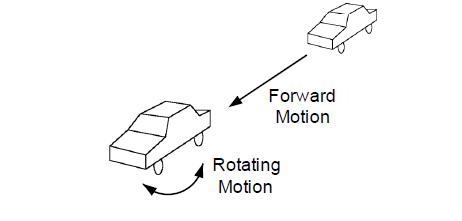
Figure 2 presents an example motion model of this. Apart from forward motion,
objects in the scene could have a rotating motion as well. Then motion of each pixel on the
object should be better described by multiple motions instead of constant and isotropic
motion. With this more accurate motion model, a more relevant motion deblurring can then
be performed on each snapshot of the object in the input frames. Finally, super-resolution
technique will then applied on the deblurred snapshots to further enhance the clarity of the
object of interest.
Figure 2: Illustration of multiple motion model
[1] SC Park, MK Park, MG Kang,
ōSuper-resolution image reconstruction: a technical
overviewö, IEEE signal processing magazine, 20(3),
pp21-36, 2003
[2] S. K. Nayar, M. Ben-Ezra, ōMotion-based motion
deblurringö, IEEE Trans. On PAMI 26(6),
pp 689-698, 2004
[3] A. Nagy, and Z. Vamossy, ōOpenCV C# wrapper
based video enhancement using
different optical flow methods in the
super-resolutionö, 6th International Symposium on
Intelligent Systems and Informatics, pp 1-6 2008.
[4] Ronald H.Y. Chung, Francis Y.L. Chin, Kwan-Yee
K. Wong, K.P. Chow, T. Luo and Henry
S.K. Fung, "Efficient Block-based Motion
Segmentation Method using Motion Vector
Consistency", in Proc. IAPR Conference on Machine
Vision Applications (MVA2005),
Tsukuba, Japan, pp.550-553, 2005.
[5] X. C. He, Nelson H. C. Yung, K.P. Chow, Francis
Y.L. Chin, Ronald H. Y. Chung, K. Y. K.
Wong, Kenneth S.H. Tsang, ōWatershed Segmentation
with Boundary Curvature Ratio
Based Merging Criterionö, proceeding of The Ninth
IASTED International Conference on
Signal and Image Processing,576(178), Hawaii, USA,
August, 2007.
[6] S.C. Yuk, K.K.Y. Wong, H.Y. Chung, K.P. Chow,
Chin F.Y.L. and Tsang K.S.H.,
Object-Based Surveillance Video Retrieval System
With Real-Time Indexing Methodology,
International Conference on Image Analysis and
Recognition. Montreal, Canada, 2007,
626-637.
[7] H.Y. Chung, K.K.Y. Wong, F.Y.L. Chin, K.P. Chow
and S.C. Yuk, Generalized Motion and
Edge Adaptive Interpolation De-interlacing
Algorithm, WSEAS Transactions on Computers.
2006, 5(11): 2544-2551.
[8] K-Y.K. Wong, F.Y.L. Chin, R.H.Y. Chung, , K.P.
Chow and S.C. Yuk, Motion and Edge
Adaptive Interpolation De-Interlacing Algorithm,
10th WSEAS Int. Conf. on Computers,
Greece, 2006.
[9] S. Zhong, F. Chin, Y.S. Cheung and D. Kwan,
ōHierarchical motion estimation based on
visual patterns for video coding,ö in IEEE Proc.
ICASSPÆ 96, pp. 2325-2328 (1996).
[10] Boris Wai-Sing Yiu, Kwan-Yee Kenneth Wong,
Francis Y.L. Chin and R.H.Y. Chung,
"Explicit Contour Model for Vehicle Tracking with
Automatic Hypothesis Verification", to
appear in Proc. International Conference on Image
Processing (ICIP05).
[11] Angie W.K. So, Kenneth K.Y. Wong, Ronald H.Y.
Chung, and Francis Y.L. Chin, "Shadow
Detection for Vehicles by Locating the Object-Shadow
Boundary", to appear in Proc.
IASTED Conference on Signal and Image Processing
(SIP 2005).
[12] R.H.Y. Chung, N.H.C. Yung and P.Y.S. Cheung,
"An Efficient Parameter-less
Quadrilateral-Based Image Segmentation Method", to
appear in IEEE Trans. PAMI.
[13] S.-F. Wong and K.-Y. K. Wong. Reliable and fast
human body tracking under information
deficiency. In Proc. IEEE Intelligent Automation
Conference, pages 491¢498, Hong Kong,
China, December 2003.
[14] S.-F. Wong and K.-Y. K. Wong. Fast and reliable
recognition of human motion from
motion trajectories using wavelet analysis. In Proc.
1st IFIP International Conference on
Artificial Intelligence Applications and
Innovations, Toulouse, France, August 2004.
[15] S.-F. Wong and K.-Y. K. Wong. Fast face
detection using quadtree based color analysis
and support vector verification. In Proc.
International Conference on Image Analysis and
Recognition, pages 676¢683, Porto, Portugal,
September 2004.
[16] S.-F. Wong and K.-Y. K. Wong. Robust image
segmentation by texture sensitive snake
under low contrast environment. In Proc.
International Conference on Informatics in Control,
Automation and Robotics, pages 430¢434, Setubal,
Portugal, August 2004.
[17] X. C. He and N.H.C. Yung, ōCurvature Scale
Space Corner Detector with Adaptive
Threshold and Dynamic Region of Supportö,
Proceedings of the 17th International
Conference on Pattern Recognition, 2:791-794, August
2004.
[18] X. C. He and N. H. C. Yung, ōCorner detector
based on global and local curvature
propertiesö, Optical Engineering, 47(5), pp: 057008,
2008
[19] X. C. He and N. H. C. Yung, ōA New Method for
Solving Ill-Condition in Vanishing Point
Based Camera Calibrationö, Optical Engineering,
46(3), pp:037202, 2007.
[20] C. Harris. ōDetermination of ego-motion from
matched pointsö. In Proc. Alvey Vision
Conf., Cambridge, UK, 1987
[21] G. S. K. Fung, N. H. C. Yung, G.K.H. Pang,
ōCamera calibration from road lane markings,ö
Optical engineering, 42(10), 2967-2977, 2003.